分享一下在主机中使用 gdb 工具分析 linux 内核产生 Call Trace 信息的方法。
平台信息
平台: RUBIK Pi 3 (QCS6490)
基线: Qualcomm Linux 1.5
Yocto 版本:scarthgap
Linux 内核版本:6.6
GDB 分析 Linux Call Trace 的方法和平台无关,各平台和基线都适用。
结论先行(没那么复杂,核心就两条命令)
使用 gdb 可分析 vmlinux 和 .ko 文件,根据地址或函数符号 + 地址偏移,就能定位到出错的代码,具体到文件和行数;大多情况的空指针访问问题都可以快速定位;
一种 ko 文件的分析命令:
gdb-multiarch camera_qcm6490.ko
list *(cam_register_subdev+0xac)
可能需要了解的
GDB
GDB(GNU Debugger)是一个强大的源代码级调试器,除了能调试用户层运行时的程序外(如打断点等),还能分析试静态的 Linux 文件。
- 为什么能调试静态的文件,使用下面的命令可以查看 elf 文件的段信息
readelf -S vmlinux
输出结果:
tsdl@tsdl-HP-EliteDesk-880-G6-Tower-PC:~/Downloads$ readelf -S vmlinux
There are 43 section headers, starting at offset 0x14dd61c0:
Section Headers:
[Nr] Name Type Address Offset
Size EntSize Flags Link Info Align
[ 0] NULL 0000000000000000 00000000
0000000000000000 0000000000000000 0 0 0
[ 1] .head.text PROGBITS ffffffc080000000 00010000
0000000000010000 0000000000000000 AX 0 0 65536
[ 2] .text PROGBITS ffffffc080010000 00020000
0000000000ed3000 0000000000000000 AX 0 0 65536
[ 3] .rodata PROGBITS ffffffc080ef0000 00f00000
0000000000727666 0000000000000000 WA 0 0 4096
[ 4] .pci_fixup PROGBITS ffffffc081617670 01627670
0000000000002d90 0000000000000000 A 0 0 16
[ 5] __ksymtab PROGBITS ffffffc08161a400 0162a400
000000000000f7d4 0000000000000000 A 0 0 4
[ 6] __ksymtab_gpl PROGBITS ffffffc081629bd4 01639bd4
0000000000017808 0000000000000000 A 0 0 4
[ 7] __ksymtab_strings PROGBITS ffffffc0816413dc 016513dc
0000000000040e5d 0000000000000001 AMS 0 0 1
[ 8] __param PROGBITS ffffffc081682240 01692240
00000000000037a0 0000000000000000 A 0 0 8
[ 9] __modver PROGBITS ffffffc0816859e0 016959e0
0000000000000510 0000000000000000 WA 0 0 8
[10] __ex_table PROGBITS ffffffc081685ef0 01695ef0
0000000000002b80 0000000000000000 A 0 0 4
[11] .notes NOTE ffffffc081688a70 01698a70
0000000000000054 0000000000000000 A 0 0 4
[12] .hyp.rodata PROGBITS ffffffc081689000 01699000
0000000000005000 0000000000000000 WA 0 0 16
[13] .got PROGBITS ffffffc08168e000 0169e000
0000000000000070 0000000000000008 WA 0 0 8
[14] .got.plt PROGBITS ffffffc08168e070 0169e070
0000000000000018 0000000000000008 WA 0 0 8
[15] .rodata.text PROGBITS ffffffc08168e800 0169e800
0000000000005800 0000000000000000 AX 0 0 2048
[16] .init.text PROGBITS ffffffc0816a0000 016b0000
0000000000068f14 0000000000000000 AX 0 0 8
[17] .exit.text PROGBITS ffffffc081708f18 01718f18
000000000000618c 0000000000000000 AX 0 0 8
[18] .altinstructions PROGBITS ffffffc08170f0a4 0171f0a4
000000000004e240 0000000000000000 A 0 0 1
[19] .init.data PROGBITS ffffffc081765000 01775000
0000000000035cd8 0000000000000000 WA 0 0 256
[20] .data..percpu PROGBITS ffffffc08179b000 017ab000
0000000000015168 0000000000000000 WA 0 0 64
[21] .hyp.data..percpu PROGBITS ffffffc0817b1000 017c1000
00000000000021c0 0000000000000000 WA 0 0 16
[22] .hyp.reloc PROGBITS ffffffc0817b31c0 017c31c0
0000000000000270 0000000000000000 A 0 0 4
[23] .rela.dyn RELA ffffffc0817b3430 017c3430
0000000000548610 0000000000000018 A 0 0 8
[24] .data PROGBITS ffffffc081d00000 01d10000
00000000004b56a8 0000000000000000 WA 0 0 4096
[25] __bug_table PROGBITS ffffffc0821b56a8 021c56a8
0000000000018ed0 0000000000000000 WA 0 0 4
[26] .mmuoff.data.writ PROGBITS ffffffc0821ce800 021de800
0000000000000008 0000000000000000 WA 0 0 2048
[27] .mmuoff.data.read PROGBITS ffffffc0821cf000 021df000
0000000000000008 0000000000000000 WA 0 0 8
[28] .pecoff_edata_pad PROGBITS ffffffc0821cf008 021df008
00000000000001f8 0000000000000000 A 0 0 1
[29] .bss NOBITS ffffffc0821d0000 021df200
00000000000ac680 0000000000000000 WA 0 0 4096
[30] .debug_aranges PROGBITS 0000000000000000 021df200
000000000002d960 0000000000000000 0 0 16
[31] .debug_info PROGBITS 0000000000000000 0220cb60
000000000d6244df 0000000000000000 0 0 1
[32] .debug_abbrev PROGBITS 0000000000000000 0f83103f
0000000000673382 0000000000000000 0 0 1
[33] .debug_line PROGBITS 0000000000000000 0fea43c1
0000000001b1316d 0000000000000000 0 0 1
[34] .debug_frame PROGBITS 0000000000000000 119b7530
000000000039aed8 0000000000000000 0 0 8
[35] .debug_str PROGBITS 0000000000000000 11d52408
000000000048de8c 0000000000000001 MS 0 0 1
[36] .debug_line_str PROGBITS 0000000000000000 121e0294
0000000000025f05 0000000000000001 MS 0 0 1
[37] .debug_loclists PROGBITS 0000000000000000 12206199
0000000001fa5a54 0000000000000000 0 0 1
[38] .debug_rnglists PROGBITS 0000000000000000 141abbed
0000000000473639 0000000000000000 0 0 1
[39] .comment PROGBITS 0000000000000000 1461f226
0000000000000012 0000000000000001 MS 0 0 1
[40] .symtab SYMTAB 0000000000000000 1461f238
00000000004b2568 0000000000000018 41 171684 8
[41] .strtab STRTAB 0000000000000000 14ad17a0
0000000000304849 0000000000000000 0 0 1
[42] .shstrtab STRTAB 0000000000000000 14dd5fe9
00000000000001d0 0000000000000000 0 0 1
Key to Flags:
W (write), A (alloc), X (execute), M (merge), S (strings), I (info),
L (link order), O (extra OS processing required), G (group), T (TLS),
C (compressed), x (unknown), o (OS specific), E (exclude),
p (processor specific)
其中可以看到有 debug 段的信息,只要要分析的静态文件有 debug 段,一般都可以使用 gdb 来进行分析,比如:
进入 gdb 模式
gdb-multiarch vmlinux
gdb-multiarch 命令可以通过如下命令安装:
sudo apt install gdb-multiarch
获取函数加载地址
info address start_kernel

根据地址查看在哪个源码文件,哪行
list *(0xffffffc0816a0bd0)
查看反汇编代码
disassemble start_kernel
退出 GDB 模式
quit
vmlinux
- 常见内核镜像以及对应关系:

vmlinux (其中 VM 是指,Virtual Memory)是未经压缩的 Linux 内核 ELF 文件,包含完整符号表和调试信息,未进行任何压缩或优化,通常,这个文件不会被直接用于启动系统,而是作为生成其他格式内核映像的基础,主要用于内核开发和调试。
.ko
.ko(kernel object)是内核使用的动态链接文件,可以动态的加载,一般驱动会编译为 ko ,在开机时自动加载;
ko 文件包含符号信息(偏移地址),可以使用 GDB 工具分析。
要注意的是 ko 文件是可重定位文件,不是可执行文件,这代表 ko 没有固定加载地址, 模块的加载地址一般可通过 cat /proc/kallsyms 节点来获取; 不过大多数时候内核 crash 时无法进入系统,我们仍然可以 call trace 中的符号 + 偏移地址定位问题。
分析过程
内核模块(ko 文件)造成 Call Trace
背景
开机时内核因空指针 crash,串口打印 Call Trace 信息后重启(未开 dump 模式),需解决 crash 问题。
[ 6.275632][ T126] Unable to handle kernel NULL pointer dereference at virtual address 0000000000000008
[ 6.285379][ T126] Mem abort info:
[ 6.285380][ T126] ESR = 0x0000000096000045
[ 6.285381][ T126] EC = 0x25: DABT (current EL), IL = 32 bits
[ 6.289274][ T126] SET = 0, FnV = 0
[ 6.289275][ T126] EA = 0, S1PTW = 0
[ 6.289276][ T126] FSC = 0x05: level 1 translation fault
[ 6.289277][ T126] Data abort info:
[ 6.289277][ T126] ISV = 0, ISS = 0x00000045, ISS2 = 0x00000000
[ 6.289278][ T126] CM = 0, WnR = 1, TnD = 0, TagAccess = 0
[ 6.289279][ T126] GCS = 0, Overlay = 0, DirtyBit = 0, Xs = 0
[ 6.289280][ T126] user pgtable: 4k pages, 39-bit VAs, pgdp=000000010c261000
[ 6.289699][ T674] CAM_INFO: CAM-SMMU: cam_smmu_need_force_alloc_cached: 383: force_cache_allocs=0
[ 6.289712][ T674] CAM_ERR: CAM-MEM: cam_mem_mgr_get_dma_heaps: 474: qcom system-uncached heap not found, rc=0
[ 6.289805][ T674] CAM_WARN: CAM-CRM: cam_req_mgr_close: 189: release invoked associated userspace process has died, open_cnt: 1
[ 6.293860][ T618] cam_req_mgr soc@0:qcom,cam-req-mgr: bound soc@0:qcom,cam_smmu (ops cam_smmu_component_ops [camera_qcm6490])
[ 6.300568][ T126] [0000000000000008] pgd=0000000000000000
[ 6.304048][ T618] cam_req_mgr soc@0:qcom,cam-req-mgr: bound soc@0:qcom,cam_smmu:msm_cam_smmu_secure (ops cam_smmu_cb_component_ops [camera_qcm6490])
[ 6.309886][ T126] , p4d=0000000000000000
[ 6.313768][ T618] cam_req_mgr soc@0:qcom,cam-req-mgr: bound soc@0:qcom,cam_smmu:msm_cam_smmu_lrme (ops cam_smmu_cb_component_ops [camera_qcm6490])
[ 6.320006][ T126] , pud=0000000000000000
[ 6.323810][ T618] cam_req_mgr soc@0:qcom,cam-req-mgr: bound soc@0:qcom,cam_smmu:msm_cam_smmu_cpas_cdm (ops cam_smmu_cb_component_ops [camera_qcm6490])
[ 6.329850][ T126]
[ 6.333849][ T526] lt9611 9-0039: audio support = 0
[ 6.333910][ T526] lt9611 9-0039: supply vdd not found, using dummy regulator
[ 6.335907][ T618] cam_req_mgr soc@0:qcom,cam-req-mgr: bound soc@0:qcom,cam_smmu:msm_cam_smmu_icp (ops cam_smmu_cb_component_ops [camera_qcm6490])
[ 6.343223][ T126] Internal error: Oops: 0000000096000045 [#1] PREEMPT SMP
[ 6.343227][ T126] Modules linked in: lontium_lt9611(+)
[ 6.352610][ T618] cam_req_mgr soc@0:qcom,cam-req-mgr: bound soc@0:qcom,cam_smmu:msm_cam_icp_fw (ops cam_smmu_fw_dev_component_ops [camera_qcm6490])
[ 6.363032][ T126] rpmsg_ctrl camera_qcm6490(OE+) cec husb238 qrtr_smd fastrpc rpmsg_char rpisense_core kfifo_buf snd_soc_es8316 spidev qmi_cooling typec_ucsi pmic_glink_altmode qcom_battmgr hci_uart snd_sw
[ 6.375104][ T618] cam_req_mgr soc@0:qcom,cam-req-mgr: bound soc@0:qcom,cam_smmu:msm_cam_smmu_jpeg (ops cam_smmu_cb_component_ops [camera_qcm6490])
[ 6.386846][ T126] bcmdhd snd_soc_qcom_common bluetooth iris_vpu(O) gpio_sbu_mux snd_soc_simple_card_utils v4l2_mem2mem videobuf2_v4l2 cfg80211
[ 6.392585][ T618] cam_req_mgr soc@0:qcom,cam-req-mgr: bound soc@0:qcom,cam_smmu:msm_cam_smmu_ife (ops cam_smmu_cb_component_ops [camera_qcm6490])
[ 6.406389][ T126] ocmem videodev gpu_sched qcom_pon drm_display_helper nvmem_qcom_spmi_sdam qcom_spmi_adc_tm5 rtc_pm8xxx ecdh_generic
[ 6.411214][ T618] CAM_INFO: CAM-CPAS: cam_cpas_get_hw_features: 515: feature 0x4 addr 0x7801fc, mask 0x10, shift 0x4 type 0x0 hw_map 0x4
[ 6.424232][ T126] ecc videobuf2_common drm_dp_aux_bus qcom_stats rfkill mc spi_geni_qcom i2c_qcom_geni phy_qcom_qmp_combo typec gpi msm_kgsl(O) icc_bwmon
[ 6.428455][ T618] CAM_INFO: CAM-CPAS: cam_cpas_get_hw_features: 539: fuse_addr 0x7801fc, fuse_val 70000
[ 6.442442][ T126] qcom_eud qcrypto qcom_q6v5_pas pinctrl_sc7280_lpass_lpi qcom_rproc_minidump display_connector qcom_pil_info pinctrl_lpass_lpi llcc_qcom sha256_generic
[ 6.444694][ T618] CAM_INFO: CAM-CPAS: cam_cpas_get_hw_features: 598: feature 0x4 enable=1 hw_map=0x4
[ 6.447554][ T124] Bluetooth: hci0: BCM: chip id 130
[ 6.447845][ T124] Bluetooth: hci0: BCM: features 0x0f
[ 6.448966][ T124] Bluetooth: hci0: BCM4345C5
[ 6.448971][ T124] Bluetooth: hci0: BCM4345C5 (003.006.006) build 0000
[ 6.449711][ T124] Bluetooth: hci0: BCM4345C5 'brcm/BCM4345C5.hcd' Patch
[ 6.449784][ T126] qcom_q6v5 xhci_pci authenc drm_kms_helper qcom_sysmon xhci_pci_renesas libdes pwm_fan
[ 6.457201][ T618] CAM_INFO: CAM-CPAS: cam_cpas_get_hw_features: 515: feature 0x6 addr 0x7801fc, mask 0x20, shift 0x5 type 0x0 hw_map 0x10
[ 6.470746][ T126] qcom_rng pmic_glink icc_osm_l3 socinfo stm_p_ost stm_heartbeat stm_ftrace
[ 6.477898][ T618] CAM_INFO: CAM-CPAS: cam_cpas_get_hw_features: 598: feature 0x6 enable=1 hw_map=0x10
[ 6.483342][ T126] stm_console nt36xxx_i2c(O) panel_event_notifier ipa qcom_common qcom_glink_smem
[ 6.497075][ T618] CAM_INFO: CAM-CPAS: cam_cpas_get_hw_features: 515: feature 0x7 addr 0x7801fc, mask 0x40, shift 0x6 type 0x0 hw_map 0xff
[ 6.520495][ T126] mdt_loader coresight_tpdm coresight_tpda coresight_tmc usb_f_qdss coresight_tgu coresight_stm stm_core coresight_replicator
[ 6.534143][ T618] CAM_INFO: CAM-CPAS: cam_cpas_get_hw_features: 598: feature 0x7 enable=1 hw_map=0xff
[ 6.547504][ T126] qrtr coresight_remote_etm coresight_csr coresight_funnel coresight_dummy zram zsmalloc drm
[ 6.561062][ T618] CAM_INFO: CAM-CPAS: cam_cpas_get_hw_features: 515: feature 0x0 addr 0x7801fc, mask 0x80, shift 0x7 type 0x0 hw_map 0xff
[ 6.573631][ T126] coresight_cti coresight at803x fuse ipv6
[ 6.573636][ T126] CPU: 4 PID: 126 Comm: kworker/u16:6 Tainted: G OE 6.6.90 #1
[ 6.586477][ T618] CAM_INFO: CAM-CPAS: cam_cpas_get_hw_features: 598: feature 0x0 enable=1 hw_map=0xff
[ 6.600819][ T126] Hardware name: Thundercomm, Inc. RUBIK Pi 3 (DT)
[ 6.600820][ T126] Workqueue: events_unbound deferred_probe_work_func
[ 6.610729][ T618] CAM_INFO: CAM-CPAS: cam_cpas_get_hw_features: 515: feature 0x8 addr 0x7801fc, mask 0x100, shift 0x8 type 0x0 hw_map 0x10
[ 6.626410][ T126]
[ 6.626411][ T126] pstate: 60400005 (nZCv daif +PAN -UAO -TCO -DIT -SSBS BTYPE=--)
[ 6.626413][ T126] pc : cam_register_subdev+0xac/0x260 [camera_qcm6490]
[ 6.636054][ T618] CAM_INFO: CAM-CPAS: cam_cpas_get_hw_features: 598: feature 0x8 enable=1 hw_map=0x10
[ 6.641236][ T126] lr : cam_register_subdev+0x70/0x260 [camera_qcm6490]
[ 6.646607][ T618] CAM_INFO: CAM-CPAS: cam_cpas_get_hw_features: 515: feature 0x9 addr 0x7801a4, mask 0x10000000, shift 0x1c type 0x0 hw_map 0xff
[ 6.651159][ T126] sp : ffffffc0835c3ad0
[ 6.651160][ T126] x29: ffffffc0835c3ad0 x28: 0000000000000000 x27: 0000000000000000
[ 6.651162][ T126] x26: 0000000000000000 x25: 0000000000000000 x24: 000000000000015e
[ 6.657959][ T618] CAM_INFO: CAM-CPAS: cam_cpas_get_hw_features: 539: fuse_addr 0x7801a4, fuse_val 20000000
[ 6.664921][ T126]
[ 6.664922][ T126] x23: ffffffe860924e60 x22: ffffff808c835b40 x21: ffffff808c835a88
[ 6.664924][ T126] x20: ffffffe860927468 x19: ffffff808c835a80 x18: ffffffffffffffff
[ 6.674829][ T618] CAM_INFO: CAM-CPAS: cam_cpas_get_hw_features: 598: feature 0x9 enable=1 hw_map=0xff
[ 6.680228][ T526] lt9611 9-0039: LT9611 revision: 0xe2.17.02
[ 6.687745][ T126] x17: 646e756f66204f49 x16: ffffffe8ce84861c x15: 3132203a61746164
[ 6.687747][ T126] x14: 5f74645f7465675f x13: 000000000000054b x12: 00000000ffffffea
[ 6.687749][ T126] x11: 00000000ffffdfff
[ 6.699094][ T618] CAM_INFO: CAM-CPAS: cam_cpas_hw_get_hw_info: 1862: fuse info->num_fuses 2
[ 6.706293][ T126] x10: ffffffe8cf76c190 x9 : ffffffe8cf6bc130
[ 6.706295][ T126] x8 : ffffff8081584d80 x7 : 00000000ffffffff x6 : ffffff808c835b60
[ 6.706297][ T126] x5 : 000000000001000c x4 : ffffff808c835c30 x3 : 0000000000000000
[ 6.706299][ T126] x2 : ffffffe860821268 x1 : ffffffe8609274d8
[ 6.739312][ T526] lt9611 9-0039: CEC adapter registered
[ 6.742019][ T126] x0 : 0000000000000000
[ 6.751746][ T526] lt9611 9-0039: CEC init success
[ 6.762082][ T126]
[ 6.762083][ T126] Call trace:
[ 6.762085][ T126] cam_register_subdev+0xac/0x260 [camera_qcm6490]
[ 7.038678][ T126] cam_eeprom_init_subdev+0x78/0xd0 [camera_qcm6490]
[ OK ] Found device /dev/fastrpc-adsp-secu[ 7.045re.
[ 7.083094][ T126] i2c_device_probe+0x1b4/0x35c
[ 7.088835][ T126] really_probe+0x148/0x2b0
[ 7.093415][ T126] __driver_probe_device+0x78/0x12c
[ 7.098704][ T126] driver_probe_device+0x3c/0x15c
[ 7.103814][ T126] __device_attach_driver+0xb8/0x134
[ 7.109188][ T126] bus_for_each_drv+0x88/0xe8
[ 7.113940][ T126] __device_attach+0xa0/0x190
[ 7.118688][ T126] device_initial_probe+0x14/0x20
[ 7.123790][ T126] bus_probe_device+0xac/0xb0
[ 7.128533][ T126] deferred_probe_work_func+0x88/0xc0
[ 7.133985][ T126] process_one_work+0x170/0x400
[ 7.138904][ T126] worker_thread+0x320/0x438
[ 7.143554][ T126] kthread+0x110/0x114
[ 7.143556][ T126] ret_from_fork+0x10/0x20
[ OK ] Found device /dev/fastrpc-cdsp-secu[ 7.143re.
[ 7.189680][ T126] ---[ end trace 0000000000000000 ]---
[ 7.195962][ T126] Kernel panic - not syncing: Oops: Fatal exception
[ 7.200283][ T124] Bluetooth: hci0: BCM: features 0x0f
[ 7.202028][ T124] Bluetooth: hci0: BCM4345C5 Ampak AP5256 UART 37.4 MHz BT 5.2 [Version: 1081.1154]
[ 7.202030][ T124] Bluetooth: hci0: BCM4345C5 (003.006.006) build 1154
[ 7.224571][ T126] SMP: stopping secondary CPUs
[ 7.229406][ T126] Triggering bite
[ 7.233079][ T126] gh-watchdog hypervisor:qcom,gh-watchdog: Causing a QCOM Apps Watchdog bite!
[ 7.242175][ T126] gh-watchdog hypervisor:qcom,gh-watchdog: vWdog-CTL: 1, vWdog-time since last pet: 2358, vWdog-expired status: 1
分析
- 根据打印信息,可以知道:
a. 对空指针进行访问(因为是64位系统, 0000000000000008 大概率是访问了结构体中的第二个参数)
b. 出现问题的模块名是 camera_qcm6490
c. 最后导致 crash 的函数名是 cam_register_subdev
d. 出现问题的内存地址是 cam_register_subdev+0xac,大概在整个 cam_register_subdev 函数的 28% 处(0xac 是地址偏移,0x260 是整个函数大小(0x260 字节),0xac/0x260 ≈ 172/608 ≈ 0.28,这个 28% 是汇编来说,对 C 可能参考不大)
Unable to handle kernel NULL pointer dereference at virtual address 0000000000000008
cam_register_subdev+0xac/0x260 [camera_qcm6490]
- 获取出现问题的 ko 文件
camera_qcm6490.ko
- 使用 gdb 加载 ko
gdb-multiarch camera_qcm6490.ko
也可以
gdb-multiarch vmlinux
add-symbol-file camera_qcm6490.ko
-
定位文件和行数
a. 定位 cam_register_subdev
info functions cam_register_subdev

b. 先把整个函数列出来
int cam_register_subdev(struct cam_subdev *csd)
{
struct v4l2_subdev *sd;
int rc;
if (!g_dev.state) {
CAM_DBG(CAM_CRM, "camera root device not ready yet");
return -EPROBE_DEFER;
}
if (!csd || !csd->name) {
CAM_ERR(CAM_CRM, "invalid arguments");
return -EINVAL;
}
mutex_lock(&g_dev.dev_lock);
sd = &csd->sd;
v4l2_subdev_init(sd, csd->ops);
sd->internal_ops = csd->internal_ops;
snprintf(sd->name, V4L2_SUBDEV_NAME_SIZE, "%s", csd->name);
v4l2_set_subdevdata(sd, csd->token);
sd->flags = csd->sd_flags;
sd->entity.num_pads = 0;
sd->entity.pads = NULL;
sd->entity.function = csd->ent_function;
list_add(&csd->list, &cam_req_mgr_ordered_sd_list);
list_sort(NULL, &cam_req_mgr_ordered_sd_list,
cam_req_mgr_ordered_list_cmp);
rc = v4l2_device_register_subdev(g_dev.v4l2_dev, sd);
if (rc) {
CAM_ERR(CAM_CRM, "register subdev failed");
goto reg_fail;
}
rc = v4l2_device_register_subdev_nodes(g_dev.v4l2_dev);
if (rc) {
CAM_ERR(CAM_CRM, "Failed to register subdev node: %s, rc: %d",
sd->name, rc);
goto reg_fail;
}
if (sd->flags & V4L2_SUBDEV_FL_HAS_DEVNODE) {
sd->entity.name = video_device_node_name(sd->devnode);
CAM_DBG(CAM_CRM, "created node :%s", sd->entity.name);
}
g_dev.count++;
reg_fail:
mutex_unlock(&g_dev.dev_lock);
return rc;
}
c. 定位行数
list *(cam_register_subdev+0xac)
在 list.h 的 153 行
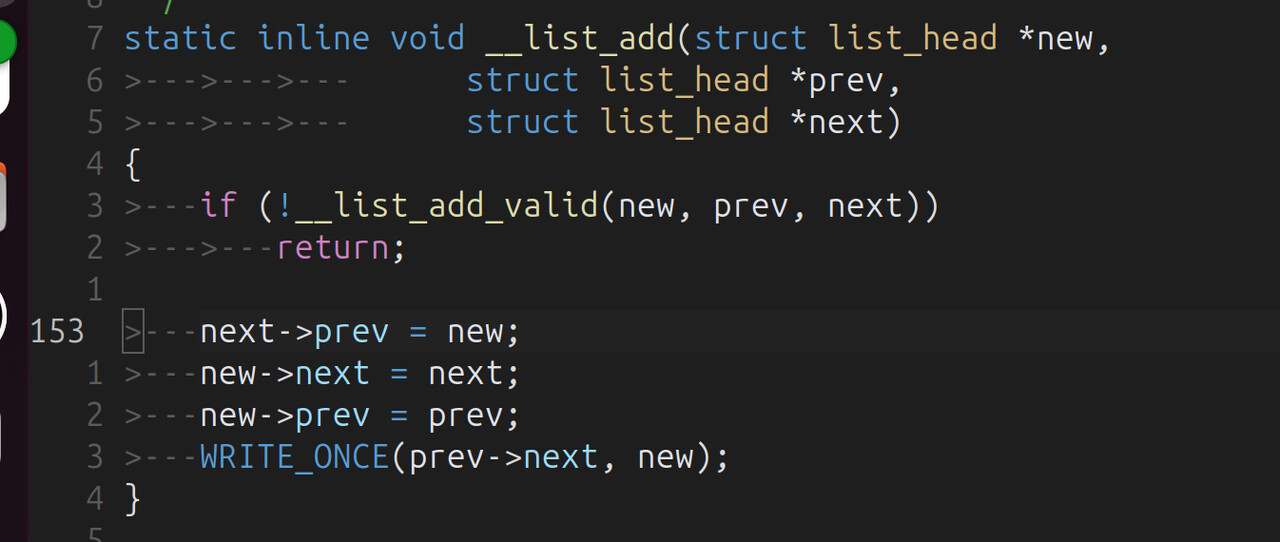
说明是 next->prev = new; 出现问题,next 是空指针,而 prev 正好是 list_head 结构体的第二个参数,猜想正确;
至于为什么定位到了 list.h ,是因为 list 相关的函数大多是 inline 的,所以我们看原函数的链表相关操作的函数:
(这里也可以看汇编代码定位, 比如查看 bl 指令的个数定位)
list_add(&csd->list, &cam_req_mgr_ordered_sd_list);

根据 list_add 和 __list_add 函数,我们就可以确定是 cam_req_mgr_ordered_sd_list 的 next 参数没有初始化,也就是 cam_req_mgr_ordered_sd_list 这个链表没有初始化,next 为空,对空指针访问了第二个参数,相当于:
(list_head *)0->prev
解决
在 list_add 前,初始化链表
diff --git a/camera_kt/drivers/cam_req_mgr/cam_req_mgr_dev.c b/camera_kt/drivers/cam_req_mgr/cam_req_mgr_dev.c
index bde4e14f..7df323c8 100644
--- a/camera_kt/drivers/cam_req_mgr/cam_req_mgr_dev.c
+++ b/camera_kt/drivers/cam_req_mgr/cam_req_mgr_dev.c
@@ -33,7 +33,7 @@
static struct cam_req_mgr_device g_dev;
struct kmem_cache *g_cam_req_mgr_timer_cachep;
static struct list_head cam_req_mgr_ordered_sd_list;
-
+static LIST_HEAD(cam_req_mgr_ordered_sd_list);
DECLARE_RWSEM(rwsem_lock);
static struct device_attribute camera_debug_sysfs_attr =
@@ -882,8 +882,6 @@ static int cam_req_mgr_component_master_bind(struct device *dev)
if (rc)
goto video_setup_fail;
- INIT_LIST_HEAD(&cam_req_mgr_ordered_sd_list);
-
if (g_cam_req_mgr_timer_cachep == NULL) {
g_cam_req_mgr_timer_cachep = KMEM_CACHE(cam_req_mgr_timer, 0x0);
--
2.25.1
内核镜像造成 Call Trace
和 ko 是一样的, 等遇到类似问题时更新案例。
参考资料
常用 gdb 命令(来自 AI 仅供参考):
(gdb) info functions # 查看所有函数符号
(gdb) info variables # 查看所有变量符号
(gdb) info types # 查看所有类型定义
(gdb) info functions cam_ # 查看所有 cam_ 开头的函数
(gdb) info variables g_ # 查看所有 g_ 开头的变量
(gdb) info functions ^cam_.* # 使用正则表达式
(gdb) info address cam_register_subdev # 查看函数地址
(gdb) info symbol 0xffffffc00123ebd8 # 通过地址查符号名
(gdb) whatis cam_register_subdev # 查看符号类型
(gdb) disassemble cam_register_subdev # 反汇编整个函数
(gdb) disassemble cam_register_subdev +0xac # 从特定偏移开始
(gdb) disassemble 0xffffffc00123ebd8, +20 # 反汇编地址范围
(gdb) disassemble /m cam_register_subdev # 混合显示源码和汇编
(gdb) disassemble /r cam_register_subdev # 显示原始字节码
(gdb) disassemble /mr cam_register_subdev # 混合显示+原始字节
(gdb) maintenance info sections # 显示所有段信息
(gdb) info files # 显示文件段映射
(gdb) info target # 显示目标文件信息
(gdb) x/10i &cam_register_subdev # 查看代码段
(gdb) x/10x &g_dev # 查看数据段
(gdb) x/10s device_name # 查看字符串
(gdb) p &cam_register_subdev # 获取函数地址
$1 = (void (*)(void)) 0xffffffc00123ebd8
(gdb) p &cam_unregister_subdev # 获取下一个函数地址
$2 = (void (*)(void)) 0xffffffc00123ef84
(gdb) p &cam_unregister_subdev - &cam_register_subdev
$3 = 0x3ac # 计算函数大小
(gdb) ptype struct cam_subdev # 查看结构体定义
(gdb) ptype /o struct cam_subdev # 显示偏移布局
(gdb) print sizeof(struct cam_subdev) # 查看结构体大小
(gdb) print &((struct cam_subdev *)0)->name # 查看成员偏移